ロボット導入でコストダウン・生産性向上を実現するための

現場ですぐ役立つ!
エンジニアの研修に!
「九州生産技術セミナー」





ロボットを選定する際には作業内容や近接するロボットとの干渉を回避するために設置形態を考慮する必要があります。一般的な設置形態としては、
1.平面固定型
2.平面移動型 3.上面固定型 4.上面移動型 などがあります。設置形態を選定することによって、狭いスペースへの複数台ロボットの近接配置、分割工程の統合化など高密度配置のロボットシステムを構築することが可能となります。 |
 |
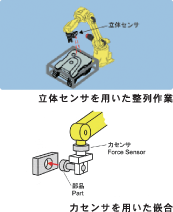
知能アプリケーションには主にビジョンセンサと力センサが挙げられます。
ビジョンセンサとは、人間でいう目の役割を果たすものです。立体センサを用いると、整列されていない部品のハンドリングが可能となります。また、部品を整列させる作業や、専用の部品供給機や整列用パレットが不要となり、低コストの自動化システムを構築することができます。
力センサとは、人間の手探りでの作業をロボット化することが可能となるものです。これにより手先の力加減の微妙な制御が可能となり、精密嵌め合い、歯車の組立て作業をロボット化することができます。
ロボットを選定する際は、ロボットだけでなくどういったアプリケーションを取り揃えているかも重要な要素となります。 |
 |